













Table of Contents
はじめに
現代のファクトリーオートメーションは、より高い精度、高速スループット、そして信頼性の向上に対する要求を背景に、急速な進化を遂げています。この進化の中核を担うのがサーボモーター制御であり、複雑な産業システムにおいて正確な位置決め、同期動作、そして再現性の高いパフォーマンスを実現する重要な技術です。
高速ピック&プレース装置から精密組立ラインに至るまで、サーボシステムはモーション制御の基盤となっています。しかし、効率的なサーボ制御システムの設計は、単に適切なモーターを選定するだけでは不十分であり、リアルタイム性とシステムインテリジェンスのバランスを考慮したアーキテクチャ設計が求められます。
サーボモーター制御の理解
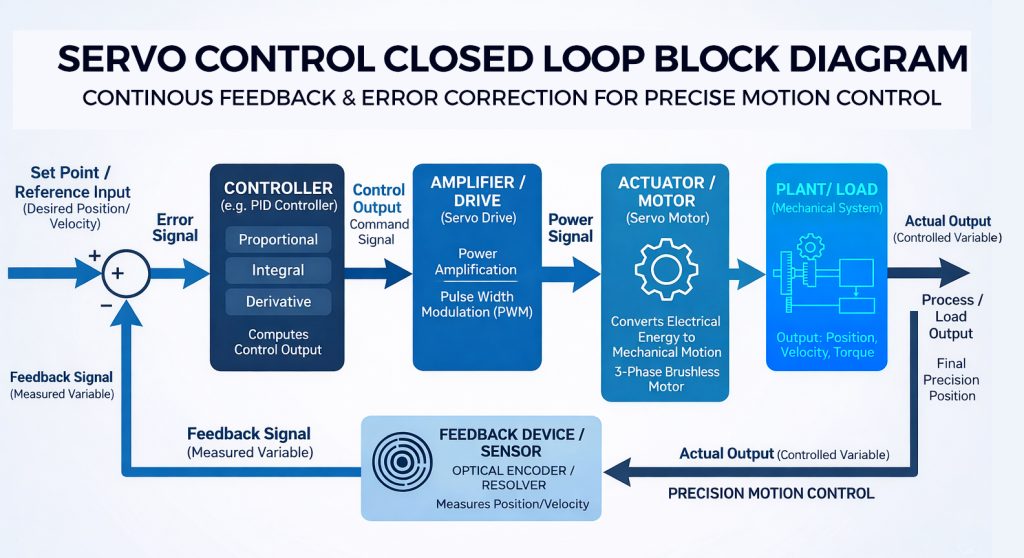
サーボモーターシステムは、フィードバックに基づいて動作を継続的に監視・調整するクローズドループ制御システムです。
主な構成要素:
- サーボモーター
- フィードバックデバイス(エンコーダ/レゾルバ)
- サーボドライブ(コントローラ)
従来のモーターとは異なり、サーボシステムは以下の特長を持ちます:
- 位置を継続的に補正
- 負荷変動下でも高精度を維持
- 位置、速度、トルクの精密制御を実現
ファクトリーオートメーションにおいては、わずかなズレでも不良につながる可能性があるため、精度は重要な要素となります。
ファクトリーオートメーションにおける主な要件
産業環境におけるサーボモーター制御システムは、厳しい性能要件を満たす必要があります:
- 決定論的なリアルタイム制御
- 超低遅延の応答性
- 高い再現性と精度
- マルチ軸同期制御
- 堅牢な産業用通信対応
わずか数マイクロ秒レベルの遅延やジッターであっても、製品品質や生産スループットに直接影響を及ぼします。
サーボ制御システムにおける課題
自動化システムの高度化に伴い、いくつかの重要な課題が浮上しています:
- リアルタイム決定性
安定したタイミングの維持が極めて重要です。非決定論的なシステムはジッターを引き起こし、モーション精度に悪影響を与えます。
2. マルチ軸協調制御
現代の装置では複数軸の動作を高精度に同期させる必要があり、システムの複雑性が増大します。
3. インテリジェンス層との統合
AIやビジョンベースのシステムの普及により、モーション制御と高レベル処理の統合が課題となっています。
4. システムのスケーラビリティ
単軸構成から多軸の産業システムへと拡張するためには、堅牢で柔軟なアーキテクチャが必要です。
最も大きな課題は、高レベルのインテリジェンスとリアルタイムなモーション制御をいかに融合させるかにあります。
サーボ制御アーキテクチャ
適切なアーキテクチャの選択は、性能・スケーラビリティ・信頼性を実現する上で極めて重要です。
- 従来型サーボドライブベースアーキテクチャ
コントローラ → 産業用ネットワーク → サーボドライブ → サーボモーター
主なメリット:
- 高精度かつ高い信頼性
- 産業環境で広く採用
- マルチ軸へのスケーラビリティに対応
この構成では、コントローラがEtherCATやCANopenなどの産業用ネットワークを介して指令を送信し、サーボドライブがリアルタイムのモーター制御を担います。
2. レイヤード制御アーキテクチャ(高レベル+リアルタイム)
高レベルコントローラ → リアルタイムコントローラ → モータードライブ → サーボモーター
主なメリット:
- 役割の分離が可能
- 高レベルコントローラは以下を担当:
- モーションプランニング
- ユーザーインターフェース
- データ処理
- リアルタイムコントローラが決定論的な実行を保証
このレイヤード構造により、インテリジェンスと精度の両立が可能となり、高度な自動化システムに最適です。
3. インテリジェントオートメーションアーキテクチャ
処理ユニット → ビジョン/AI → モーションプランニング → サーボドライブ → サーボモーター
主なメリット:
- 適応型かつスマートなシステムを実現
- リアルタイムの意思決定に対応
- Industry 4.0環境に最適
このアーキテクチャは、機械がリアルタイムで「見る・考える・動く」ことが求められるシステムにおいて、ますます採用が進んでいます。
実世界での活用例
サーボモーター制御は、ファクトリーオートメーションのさまざまな分野で広く活用されています:
- ピック&プレースロボット
- 精密組立ライン
- 包装・ラベリング装置
- カメラ位置合わせおよび検査システム
- CNCおよび加工センター
高速アプリケーションにおいては、サーボシステムが最小のサイクルタイムで高精度な位置決めを実現し、生産性に直接的な影響を与えます。
サーボシステム設計のベストプラクティス
信頼性とスケーラビリティの高いサーボ制御システムを構築するためには:
専用のリアルタイムコントローラを使用する
モーション制御を非リアルタイム処理ユニットのみに依存しない。
インテリジェンスと実行を分離する
モーションプランニングやAI処理は、リアルタイム制御ループと分離する。
適切な通信プロトコルを選定する
EtherCAT、PROFINET、CANopenなどにより決定論的な通信を実現。
フィードバック精度を重視する
高品質なエンコーダやフィードバックシステムが精度確保の鍵。
スケーラビリティを考慮した設計を行う
マルチ軸拡張時にも性能低下が起きない設計とする。
サーボモーター制御の将来動向
ファクトリーオートメーションは、よりスマートで接続性の高いシステムへと進化しています:
- AIによるモーション制御
- データ分析を活用した予知保全
- 決定論的通信を実現するTSN(Time-Sensitive Networking)
- リアルタイム意思決定を可能にするエッジインテリジェンス
今後は、モーション制御とインテリジェントで接続されたシステムのシームレスな統合が鍵となります。
まとめ
サーボモーター制御は、現代のファクトリーオートメーションの基盤であり続けています。しかし、高精度とスケーラビリティを実現するためには、単に適切なコンポーネントを選定するだけでなく、リアルタイム実行とインテリジェント制御のバランスを考慮したアーキテクチャ設計が不可欠です。
産業界がスマートファクトリーへと進む中で、モーション制御、AI、そしてコネクティビティの融合が次世代オートメーションを形作っていきます。
VVDNによる次世代オートメーションの実現
このような高度な自動化システムの構築には、ハードウェア、ソフトウェア、そしてシステム統合における深い専門知識が求められます。
VVDN Technologiesは、以下のエンドツーエンドの対応力を提供します:
- 組み込みハードウェア設計
- リアルタイムソフトウェアおよびBSP開発
- 産業用通信の統合
- ビジョンシステムおよびAIの実装
- 製造および大規模展開
高性能な処理能力と産業グレードの信頼性が求められるアプリケーションにおいては、VVDNが設計・サポートするNXP i.MX 94 SoMのようなプラットフォームが、インテリジェントオートメーションの強力な基盤となります。
次世代ロボティクス、スマート検査システム、またはスケーラブルな工場自動化プラットフォームの構築において、VVDNはコンセプトから実装までのプロセスを加速します。